Nouveauté 2021 : Le calculateur marine réinventé, issu de la voile de compétition: Ouvert, Intégration rapide, agile et intuitive.
Quantum réduit les coûts et délais de votre projet. Il vous permet :
- L’interfaçage de vos instruments en quelques minutes, via plus de 3300 nodes disponibles (IP, NMEA, PLC, Domotique…).
- La réalisation d’une interface homme machine moderne et à façon en quelques heures, compatible avec tous les browsers web et les afficheurs multifonctions MFD de dernière génération.
- Un développement visuel, une compréhension du système et une recherche de panne accessible à tous (de type déposer-glisser, No-Code/Low-Code, Statuts visuels).
- De manipuler aisément vos données (Datalog, Visualisation, Cloud, Data mining, Rejeu…).
- De facilité la réalisation d’un contrôle-commande ou d’un système de guidage intelligent.
Le calculateur Quantum Lite fournit une infrastructure de développement rapide pour la perception, la collection, la diffusion et l’observabilité des données, la réalisation d’interfaces homme-machine intelligentes.
La plateforme Quantum Lite est Starlink ready et idéale pour les applications IoT de type ‘Smart Boat’, Océanographie, Véhicules spéciaux, ‘Smart Farming’ et de l’industrie 4.0.
Le calculateur Quantum Ultima est durci, marinisé et plus performant. Il permet, de plus, la simulation, le contrôle-commande, la navigation et l’intelligence dans les applications d’engins autonomes et de robotique avancées.
La plateforme Quantum Ultima est idéale pour la réalisation de calculateurs de mission répondants à des exigences fonctionnelles des plus avancées : IA, Autonomie décisionnelle, Cobotique, Réalité augmentée, Intégration généralisée, Polyvalence opérationnelle, Adaptabilité à la mission, Sûreté de fonctionnement, Auto-diagnostic, Dépannage à distance…
« Avec Quantum, explorez l’océan immense de ce que nous ne savons pas encore ».



LA GENÈSE
Quantum est le fruit de 30 ans au plus haut niveau de l’électronique et de la robotique en milieux hostiles (marine, sous-marine…).
Les besoins et constats des retours d’expériences sont :
- Aller droit au but :
- L’on passe 90% du temps de développement d’un projet dans ‘l’emballage’ (les spécifications, les synoptiques et documentations, le hardware, l’OS, les outils de compilation, l’écriture de protocoles, le datalog/rejeu, les bugs, les qualifications) et 10% dans l’algorithme que l’on souhaite développer et tester.
Il faut une architecture qui ne réinvente pas la roue à chaque projet. - Il faut pouvoir développer à distance, car le temps, le coût et la complexité de l’engin est souvent incompatible avec la réalisation d’un banc de test.
- Une étape de pré-étude sous matlab puis un portage sur une cible est inutile quand l’on peut réaliser des simulations directement sur la cible en Python SciPy.
- L’on passe 90% du temps de développement d’un projet dans ‘l’emballage’ (les spécifications, les synoptiques et documentations, le hardware, l’OS, les outils de compilation, l’écriture de protocoles, le datalog/rejeu, les bugs, les qualifications) et 10% dans l’algorithme que l’on souhaite développer et tester.
- Gérer le déluge de données :
- Le nombre de données et points connectés augmentent exponentiellement et avec de plus en plus de protocoles du monde d’internet tel que les websocket, les micro-serveurs Web pour les afficheurs intégrant un browser, MQTT, cela continuera avec les objets connectés via StarLink.
- Le temps CPU que prend la manipulation de données à travers les drivers et protocoles est devenue prédominante sur les calculs mathématiques au cœur d’une application.
Une architecture multithreading et séquentielle classique (avec toutes les tâches en attente de données et en changement de contexte permanent) est de moins en moins pertinente vis a vis de la programmation asynchrone utilisée avec succès par les grands noms du web.
- Il faut des outils adaptés à l’enregistrement et à l’analyse de gros volumes de données.
- Gérer la complexité grandissante des systèmes :
- Il faut compenser cette complexité par de la programmation visuelle.
- Le temps de qualification explose avec cette complexité des applications, il faut un système modulaire et cloisonné qui limite la qualification aux derniers développements et facilite le développement à plusieurs.
Il faut de plus un système de simulation Hardware In the Loop minimisant les essais réels. - Il faut garantir la sûreté de fonctionnement malgré la complexité grandissante.
Souvent, un simple faux contact peut rapidement ce transformer en cauchemar voire en catastrophe.
N’importe quel utilisateur ou technicien doit pouvoir rapidement localiser les problèmes y compris à distance.
Une bonne compréhension du système passe par des synoptiques, associé à une programmation par événements non bloquants, ce sont des atouts afin d’assurer les modes dégradés et les redondances.
- Évoluer :
- L’informatique s’adapte de plus en plus à l’humain et s’éloigne de la machine. Les interfaces naturelles (voix, gestes, dessins…) sont les interfaces de demain en utilisation mais aussi en programmation.
- Il faut une architecture permettant d’évaluer rapidement les nouvelles technologies.
LE FRAMEWORK
Le calculateur Quantum répond à ces problématiques tout en offrant la possibilité de s’appuyer sur une infrastructure logicielle performante, robuste, évolutive, documentée, et surtout simple d’utilisation afin de gagner un temps précieux et de ce concentrer sur les algorithmes que l’on souhaite développer.
Pour cela, la plateforme Quantum s’appuie sur des solutions open source plébiscités :
- Node JS est un coup de génie de Ryan Dahl, qui en 2009 utilise le compilateur Java-Script & WebAssembly V8 ultra-performant de Google côté serveur. Node JS à révolutionné le monde du Web par ses performances et le fait de ne devoir connaitre qu’un seul langage pour faire du Web. Aujourd’hui, Node JS a supplanté les autres technologies et est massivement utilisé par tous les grands noms du web mais aussi dans des applications critiques, par exemple, par SpaceX dans sa capsule Dragon.
- Node-Red a été écrit par IBM, sortie en 2019 après 6 ans de développement et d’améliorations. Les 2 projets Node Js et Node-Red sont des technologies soutenues par Google, Microsoft, IBM …
- Node-Red 2.0 est une technologie mature qui n’est plus réservé qu’au seul prototypage. Il a été choisi par les plus grands industriels pour usage professionnel dans des PLC et plateformes IoT (Fujitsu, GE, Intel, Samsung, Schneider, Siemens, Weidmüller …), ainsi que dans le domaine des services cloud (AT&T, Cisco, Fujitsu, Hitachi, IBM, Nokia, Siemens…).
- Python est la référence de la Data Science et de l’IA open source de par sa simplicité d’apprentissage et ses librairies.
- Les 2 langages les plus utilisés aujourd’hui : Python et JS.
- Une communauté bouillonnante :
- Des centaines de vidéos, de sites de tutoriels et de démonstrations d’objets connectés.
- Des centaines de milliers de modules et d’exemples.
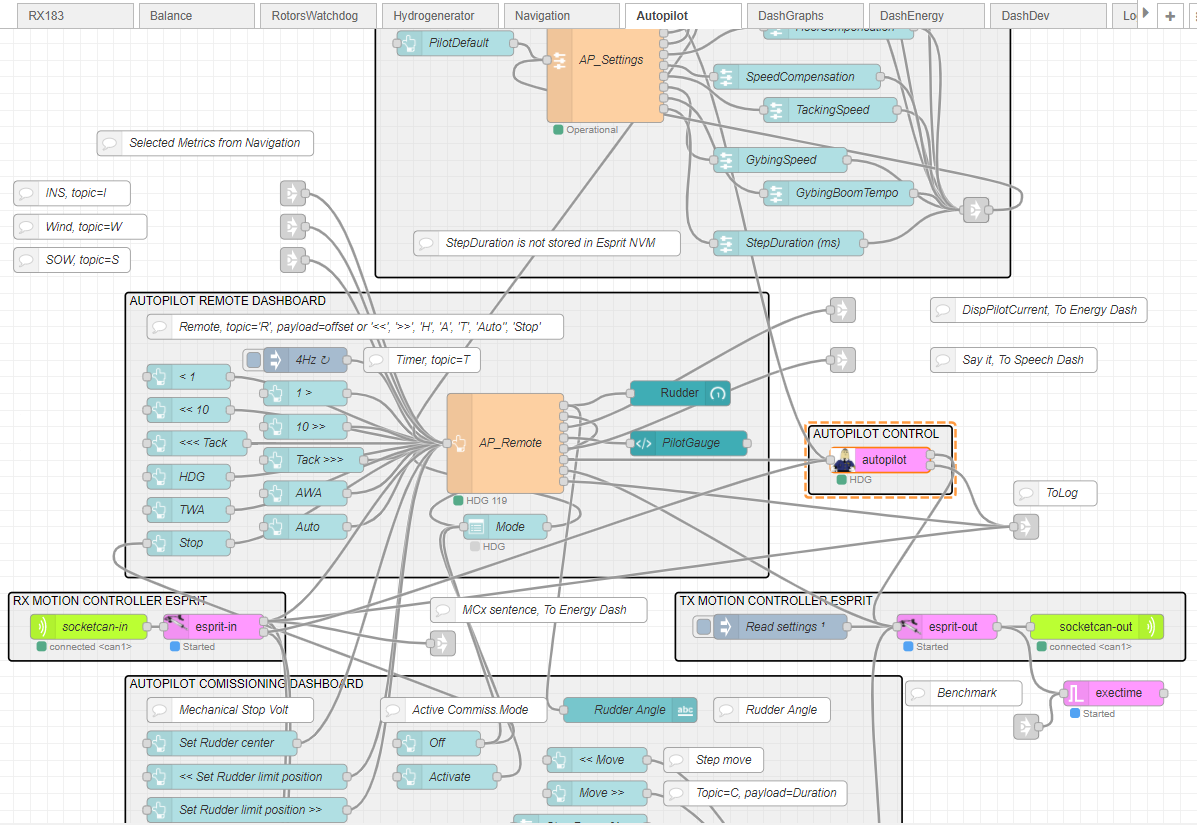
Node-Red c’est :
- Une utilisation et compréhension du système à la portée de tous via une simple interface Web, très visuelle et pratiquement sans codage.
Le système est décrit sous forme d’un graphe de flux, le code est limité à quelques fonctions ad hoc et saisi directement dans le browser Web. - Un système très performant et optimisé pour les échanges de données grâce à son séquenceur Node JS écrit en C++ qui offre une gestion asynchrone et non bloquante des événements.
- Un middleware de robotique : Austral améliore constamment l’aspect temps réel de la solution Linux RT, séquenceur Node JS et moteur V8 et développe des nodes métiers optimisés. La solution proposée est aussi un middleware de robotique qui permet d’obtenir un temps de latence moyen de l’ordre de 3ms dans le cas d’un contrôle 3D MIMO et avec une robustesse compatible avec les applications de robotique de systèmes non critiques et dont la trajectoire est commandable à 50Hz (par exemple un engin de plus de 20 Kg à moins de 100km/h). Au besoin, l’utilisation conjointe de ROS2 permet de contrôler votre engin jusqu’à 300Hz.
- Une sécurité intégrée :
- Continuous Built In Test.
- Paramétrage des priorités de fail safe.
- Localisation d’avaries aisée.
- Des tableaux de bord et graphes configurables à façon (mobile, desktop, MFD).
- Des fonctionnalités évolutives sans codage par importation de nouveaux ‘nodes’ et adaptation des exemples proposés par les écosystèmes Node-Red et Austral.
- Des réductions de coûts et délais
L’INFRASTRUCTURE QUANTUM
SPECIFICATIONS
- Matérielle :
- Processor : ARM Quad Core 1.5Ghz
- Interfaces : Gigabit Ethernet, Wifi, Bluetooth, 2xCANbus, 3xSerial (4xUSB on Lite version)
- Datalog : Up to 1TB, RTC with GNSS time synchronisation
- Safety : Watchdog
- Consumption : 3W typical
- Environmental : Passive cooling / IP67, -20 to +85°C (Ultima version) / IP20, 0 to +50°C (Lite version)
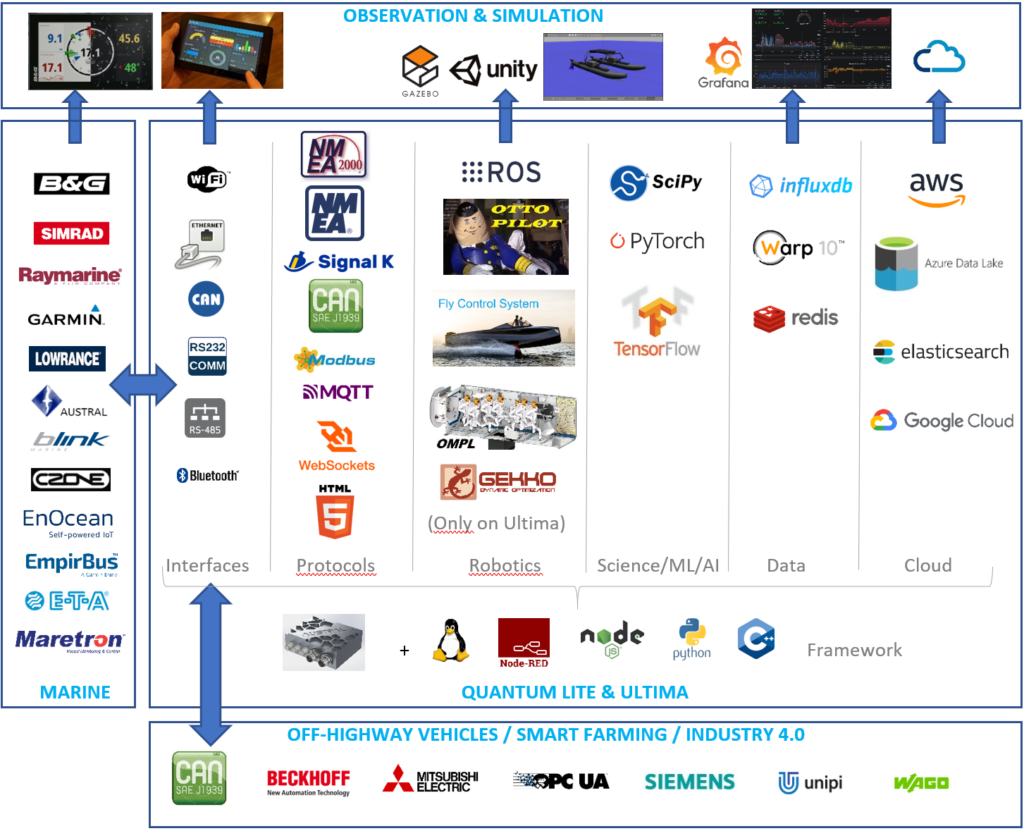
- Logicielle :
- Marine IOT : RT-Linux Debian + Node-Red + nodes Austral
- HMI/Observability : node-red-dashboard, Grafana, MFDs HTML5 app, user variables (B&G/Garmin/Simrad), J1939 Keypads, Voice Synthesis/Control (via Bluetooth) .
- Digital Twin / Web viewer : Interactive SVG/scadavis.io Dashboard (2D Vector graphics), Babylonjs/three.js (3D)
- Scripts : NodeJS, Python
- Embedded Data Collection / Time Series Database : InfluxDB, Warp 10, Grafana Loki
- Cloud bridges / Big Data : Redis RAM cache, Amazon Web Services AWS, Google Cloud Platform CGP, Microsoft Azure Data Lake, Elastisearch
- Signal Processing / Data Science / IA : SciPy, PyTorch, TensorFlow
- Interfaces marine : NMEA2000 (PGNs Simrad, B&G, Garmin), NMEA0183, J1939 (Volvo, Mercury), Signal K, Websocket, MQTT, TCP, UDP…
- I/Os marine : B&G Expansions, Maretron, EmpirBus, CZone, ETA, Blink Marine, EnOcean…
- Interfaces automotive & industrie : J1939, Modbus, OpcUa, Siemens S7, WAGO PFC, Beckhoff, Unipi, Misubishi…
- Logicielle (Ultima seulement) :
- Contrôle-commande : Autotune PID, Unsupervised Learning Control (Béta) , Flight Control System, Via SciPy ou GEKKO : LQR, Optimal Control, MPC, NMPC…
- Motion planning 2D/3D : Waypoints-Routes-Suivi de traits, Contraintes par champs de vecteurs, OMPL.
- Robotics & simulation bridge : ROS2, Gazebo, Unity
INTERFACE UTILISATEUR & HTML5 App Marine Multi-function Display (MFD)
L’interface utilisateur servie par Quantum est tactile, elle s’adapte automatiquement à la résolution de votre écran et est compatible avec tous les browsers HTML5/CSS3 sur tous les supports : Mobile, Tablette, PC, Panel PC, Web Panel, Android Panel…

Pour les milieux hostiles : L’interface utilisateur peut être combinée avec des boutons et boutons rotatifs J1939/NMEA2000 et peut être intégrée en tant de HTML5 App dans une des pages des afficheurs MFD intégrant un browser Web ainsi qu’une connectivité Wifi ou Ethernet :
- B&G :
- Vulcan (7 & 9″ – 800×480, 12″ – 1280×800)
- Zeus 3S (9 & 12″ – 1280×720, 16″ – 1920×1080)
- Zeus3 Glass Helm (16,19,24″)
- Nemesis (9 & 12″ – 1280×720)
- FURUNO :
- NavNet TZtouch3 series TZT12F, TZT16F, TZT19F (12,15.6,19″) (Software version >= v1.08)
- Navnet TZtouch2 TZT2BB Black box (Software version >= v7.01)
- GARMIN :
- EmpirBus & OneHelm TD50 (5″ – 800×400)
- OneHelm GPSMAP® 723/923/1223 (7″ – 1024×600, 9 & 12″ – 1280×720)
- OneHelm GPSMAP® 84xx (10, 12, 16, 22, 24″)
- LOWRANCE :
- HDS Live (7, 9, 12, 16″)
- HDS Carbon (7, 9, 12, 1 « )
- RAYMARINE :
- Axiom + (7″ – 1024×600, 9″ – 1280×720, 12″ – 1280×800)
- Axiom (7 & 9″ – 800×480, 12″ -1280×800)
- Axiom Pro (9, 12, 15.6″)
- Axiom XL (15.6, 18.5, 21.5″)
All Axiom MFDs running on LightHouse 3 (software version >= v3.11).
The eS & gS Series multifunction displays which have been upgraded to LightHouse 3 are not compatible.
- SIMRAD :
- Go7 XSR (7 « )
- Go9 (9 « )
- Go12 (12 « )
- NSO EVO2 (16, 19, 24 « )
- NSO EVO3 (16, 19, 24 « )
- NSS EVO3 (7, 9, 12, 16 « )
Note : Go5 and Go7 XSE not compatible
MARCHÉS VISÉS
- Bateaux connectés, Navires intelligents, IOT marine.
- Voile de compétition, Superyacht, Navires du futur.
- Drones :
- Marin : de surface USV / Drone-ship, sous-marin AUV.
- Terrestre : Agricole, livraison autonome….
- LARS (Launch and Recovery System)
- Station de Docking
- Océanographie (Bouées instrumentées, Profilers, Stations immergées…)
- Energie Marine Renouvelable.
- Off-Highway vehicles (Smart Farming, Camions spécialisés).
- Industrie.
APPLICATIONS VISÉES
- Automatisme : Assistant vocal, Gestion d’énergie, Alarme…
- Contrôle-commande de cinématiques complexes.
- Navigation autonome 2D/3D, Obstacle Avoidance System, Motion Planning, Docking.
- Contrôle de mission.
- Collecte de données (océanographie, énergie marine…)
- Plateforme de développement rapide pour l’optimisation de la sécurité et des performances (Machine Learning, Reconnaissance d’image).
PARTICIPEZ A L’ÉCOSYSTÈME QUANTUM
S’il le souhaite et sous sa responsabilité, l’utilisateur à un accès complet à l’OS et est libre d’ajouter des applications, de développer des nodes ainsi que de publier des packages NPM ou des exemples à la communauté.
Toutefois, certains nodes peuvent être à code source fermé sous forme de librairies, pré-compilés JS ou WebAssembly, ainsi qu’être liés à une plateforme spécifique par un mécanisme de clef. De nombreux langages de programmation sont possibles : Javascript, Python, C/C++/Qt, TypeScript, Rust, Go, Java…
Austral offre ainsi aux partenaires techniques la possibilité de valoriser leurs travaux via un mécanisme de licence tout en gardant confidentiel le code source.